Comment ça fonctionne ? "Le moteur pas à pas"
Rédigé par tesla - - Aucun commentaire
Les projets TSTI2D ont débuté et cette année certains auront besoin d'utiliser les moteurs pas à pas, mais avant de penser "Arduino" et donc commande, il me semblait important d'apporter quelques informations sur ce moteur très utilisé de nos jours.
En effet, l'impression 3D et la banalisation des imprimantes 3D contraint de nombreux amateurs à se familiariser avec certains composants de leur machine. Le moteur pas à pas est un élèment essentiel d'une telle imprimante, plus anciennement du temps de l'enlevement de matière, il était aussi l'élèment dynamique des CNC.
Principe de fonctionnement
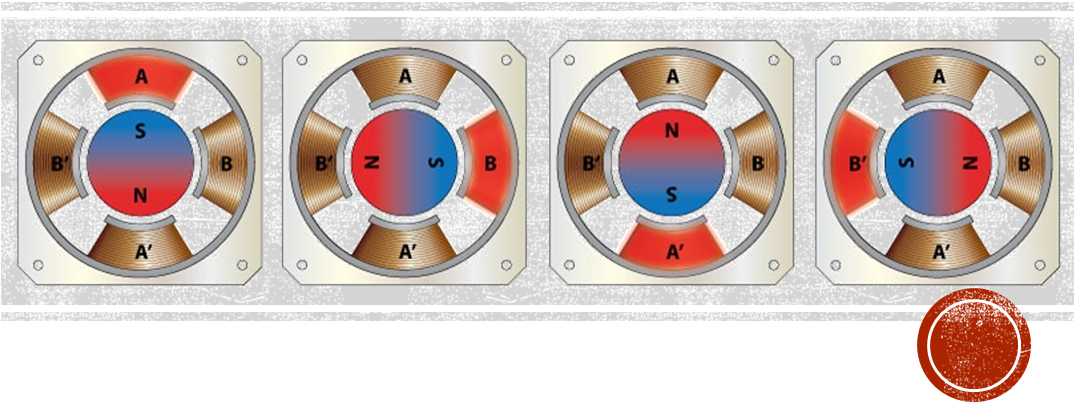
Le moteur pas à pas est un moteur CC sans balais qui tourne par étapes. Ceci est très utile car il peut être positionné avec précision sans aucun capteur de rétroaction, ce qui représente un contrôleur en boucle ouverte. Le moteur pas à pas se compose d'un rotor qui est généralement un aimant permanent et il est entouré par les enroulements du stator. En activant les enroulements étape par étape dans un ordre particulier et en laissant passer un courant, ils magnétiseront le stator et créeront respectivement des pôles électromagnétiques qui provoqueront la propulsion du moteur. Alors que «le principe de fonctionnement de base des moteurs pas à pas.
Vidéo (fr) très complète avec montage (très utile pour vos projets)
Pour ceux qui souhaitent en profiter pour travailler l'ETLV
Mode de fonctionnement/excitation
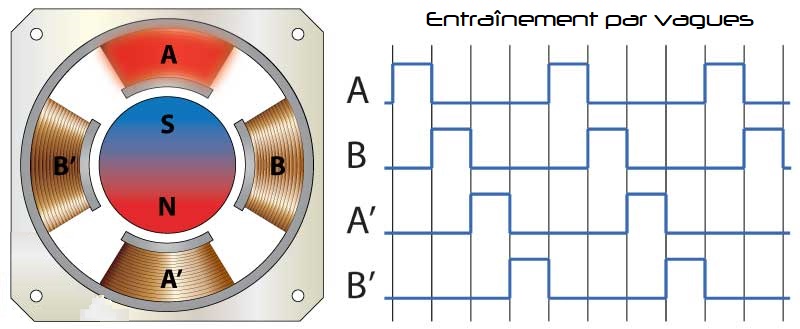
Fonctionne par vagues
Le premier est le "Wave Drive" ou "Single-Coil Excitation", ou plus simplement en français "à pas complet".
Dans ce mode, nous n'activons qu'une seule bobine à la fois, ce qui signifie que pour cet exemple de moteur à 4 bobines, le rotor effectuera un cycle complet en 4 étapes.
Il a le même nombre d'étapes que l'entraînement à pas complet, mais le moteur aura un couple nettement inférieur à celui nominal. Il est donc rarement utilisé.
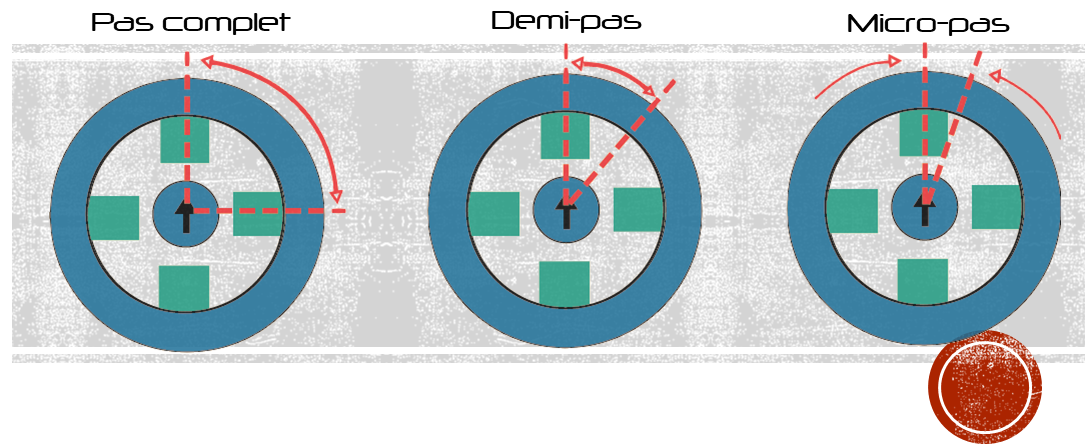
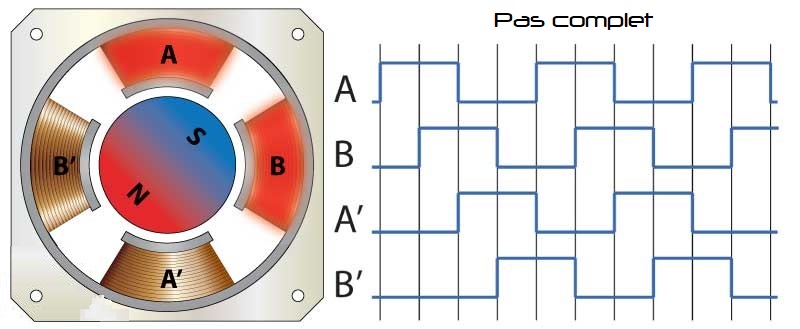
Fonctionnement en pas complet
Vient ensuite le mode d'entraînement pas à pas qui fournit un couple de sortie beaucoup plus élevé car nous avons toujours 2 bobines actives à un moment donné. Cependant cela n'améliore pas la résolution du stepper et encore une fois le rotor fera un cycle complet en 4 étapes.
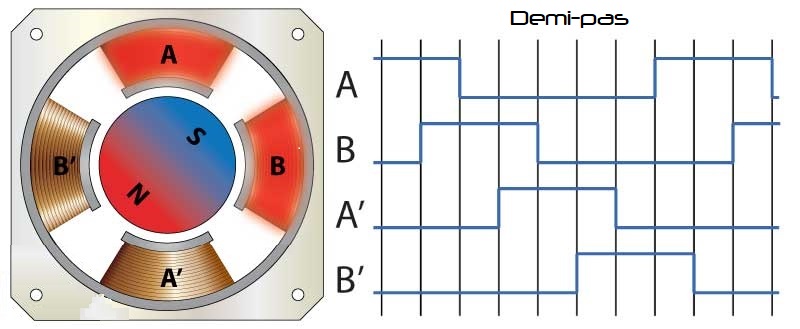
Fonctionnement en demi-pas
Pour augmenter la résolution du stepper, nous utilisons le mode Half Step Drive. Ce mode est en fait une combinaison des deux modes précédents.
Ici, nous avons une bobine active suivie de 2 bobines actives, puis à nouveau une bobine active suivie de 2 bobines actives et ainsi de suite. Donc, avec ce mode, nous obtenons le double de la résolution avec la même construction. Maintenant, le rotor effectuera un cycle complet en 8 étapes
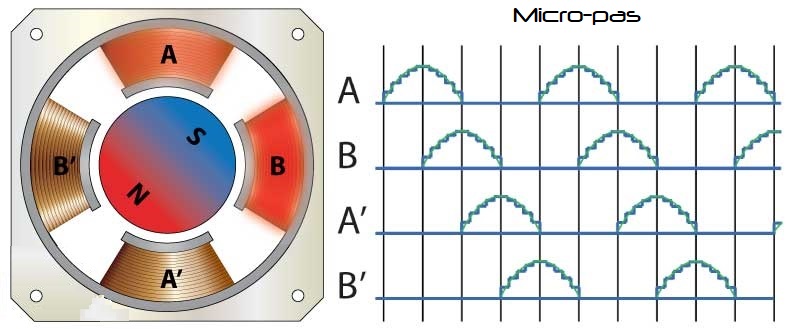
Fonctionnement en micro-pas
Cependant de nos jours la méthode la plus courante de contrôles des moteurs pas à pas est le Microstepping.
Dans ce mode, nous fournissons un courant contrôlé variable aux bobines sous forme d'onde sinusoïdale. Cela permettra un mouvement régulier du rotor, diminuera la contrainte des pièces et augmentera la précision du moteur pas à pas.
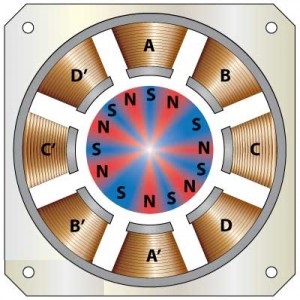
Comment davantage augmenter la résolution d'un moteur pas à pas ?
Une autre façon d'augmenter la résolution du moteur pas à pas est d'augmenter le nombre de pôles du rotor et le nombre de pôles du stator.
Les différents types de moteurs pas à pas

A aimant permanent
Le moteur pas à pas à aimant permanent possède un rotor à aimant permanent qui est entraîné par les enroulements du stator. Ils créent des pôles de polarité opposée par rapport aux pôles du rotor qui propulse le rotor.
A réluctance variable
Le moteur pas à pas à réluctance variable, utilise un rotor en fer doux non magnétisé. Le rotor a des dents qui sont décalées du stator et lorsque nous activons les enroulements dans un ordre particulier, le rotor se déplace respectivement de sorte qu'il y ait un minimum de jeu entre le stator et les dents du rotor
Hybride synchrone
Le moteur hybride synchrone est une combinaison des deux moteurs pas à pas précédents. Il a un rotor denté à aimant permanent et également un stator denté. Le rotor a deux sections, qui sont opposées en polarité et leurs dents sont décalées.
Comment choisir le bon type de moteur pas à pas ?
Nous avons vu qu'il existait différents types de moteurs pas à pas, qu'ils pouvaient fonctionner dans différents modes et pouvaient avoir des polarisations différentes (unipolaire ou bipolaire).
Ces différents types qui défininissent un moteur pas à pas sont directement liées à l'utilisation dont vous en ferez.
Il est toutefois possible de donner quelques indications.
A aimant permanent, il est un moteur à faible coût et à faible résolution. Il présente également de meilleures caractéristiques de couple que les autres types de moteurs.
A reluctance variable, le moteur nécessite au moins trois bobinages, pour obtenir un cycle complet, pas de couple résiduel, c’est-à-dire que hors tension, le rotor est libre, ce qui peut être problématique pour ce genre de moteur. La fabrication est assez délicate, les entrefers doivent être très faibles. Par contre c'est un moteur peu coûteux et d'une bonne précision.
De type pas à pas hybride, il est plus coûteux que tout autre type de moteur pas à pas et donne également les meilleurs résultats. Il combine les meilleures caractéristiques des moteurs AP et RV pour fonctionner. Il a un rotor à dents comme RV et un aimant comme un moteur pas à pas à aimant permanent.
Les moteurs pas à pas ne sont pas des moteurs rapides, les plus rapides dépassent rarement la vitesse maximale de 3 000 tr/min.
Cette « lenteur » aidant, et ces moteurs étant naturellement sans balais (la majorité des moteurs pas à pas de haute qualité est de plus équipée de roulements à billes), ces moteurs ont une durée de vie extrêmement longue, sans nécessité d'entretien.
Comment dimensionner correctement un moteur par à pas ?
Toute application impliquant l'utilisation d'un moteur pas à pas nécessite de collecter les informations indispensables à un bon dimensionnement :
- la masse de la charge à entraîner (en kg) ;
- son inertie (en kg⋅m2) ;
- le type d'entraînement mécanique (vis, courroie crantée, crémaillère, etc.) ;
- le type de guidage, afin d'estimer les frottements (secs et visqueux) ;
- les efforts de travail (en N) ;
- le déplacement le plus critique (distance en fonction d'un temps).
L'influence de la charge est directement liée au calcul du couple moteur via les paramètres du calcul inertiel (en kg⋅m2) et de l'accélération (en m⋅s−2). Pour des paramètres d'accélération et de chaîne cinématique identiques, un moteur pas à pas n'aura pas besoin du même couple selon la charge mise en jeu.
Pour une application industrielle, le dimensionnement d'un moteur pas à pas doit être calculé de façon rigoureuse ou être surdimensionné afin d'éviter tout problème de glissement par « perte de pas ». Le moteur pas à pas fonctionnant en boucle ouverte (sans asservissement), il ne récupère pas sa position de consigne en cas de glissement.
Pour aller plus loin !
Si vous souhaitez approfondir vos connaissances sur le sujet ou obtenir une information non-développée dans cette article, je vous conseille l'excellent blog d'eskimon :
- https://eskimon.fr/
- https://eskimon.fr/tuto-arduino-603-a-petits-pas-le-moteur-pas-%C3%A0-pas#utiliser-un-moteur-unipolaire
ou plus simplement les liens suivants dont le wiki du moteur pas à pas (le wiki en anglais comporte des informations pertinentes) :
- https://fr.wikipedia.org/wiki/Moteur_pas_%C3%A0_pas
- https://en.wikipedia.org/wiki/Stepper_motor
- https://www.f-legrand.fr/scidoc/docmml/sciphys/arduino/paspasunipol/paspasunipol.html
- https://openlabpro.com/guide/stepper-motor-basics/
- https://howtomechatronics.com/how-it-works/electrical-engineering/stepper-motor/
- http://www.robotpark.com/Stepper-Motor-Working