Comment ça fonctionne ? "Les servomoteurs"
Rédigé par tesla - - Aucun commentaire
Qu'est-ce qu'un servomoteur ?
Commençons par une définition assez simple...
Un servomoteur est un moteur capable de maintenir une opposition à un effort statique et dont la position est vérifiée en continu et corrigée en fonction de la mesure. C'est donc un système asservi.
C'est simple non ? bon pour ceux qui viennent d'avoir une indigestion, je vous propose la petite vidéo ci-contre.
3min11, simple et efficace !
Mais c'est quoi un système asservi ?
Il existe de nombreux types de servomoteurs et leur principale caractéristique est la capacité de contrôler avec précision la position de leur arbre. Un servomoteur est un système en boucle fermée qui utilise la rétroaction de position pour contrôler son mouvement et sa position finale.
C'est plus clair que la définition ou toujours pas ? dans ce cas je vous propose un bon vieux schéma !
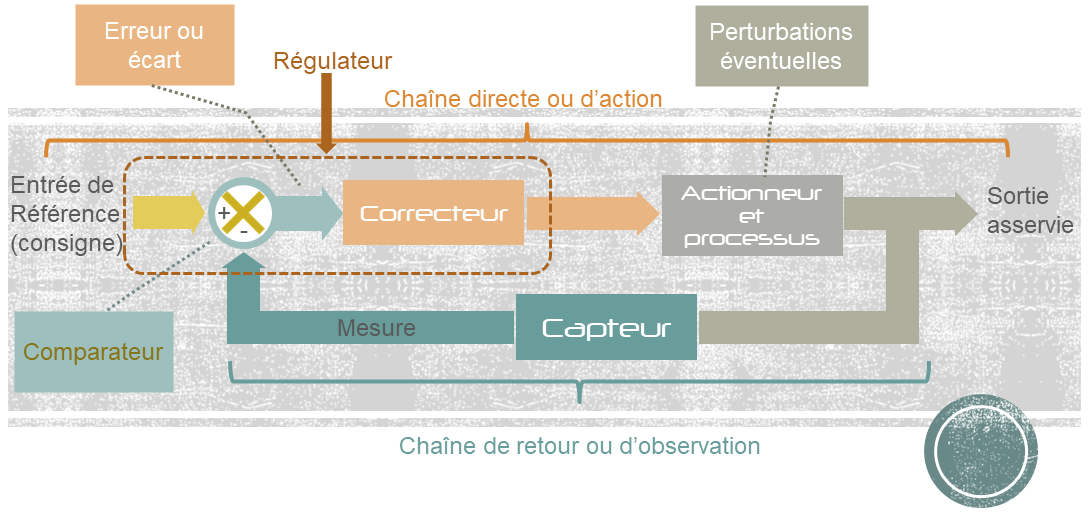
Dans les servomoteurs de type industriel, le capteur de rétroaction de position est généralement un encodeur de haute précision, tandis que dans les servos RC ou de modélisme plus petits, le capteur de position est généralement un simple potentiomètre. La position réelle capturée par ces appareils est renvoyée au "détecteur d'erreur" où elle est comparée à la position cible. Ensuite, en fonction de l'erreur, le contrôleur corrige la position réelle du moteur pour qu'elle corresponde à la position cible.
Et donc ?
Et donc...il est possible de faire un "parallèle" avec nos servomoteurs !
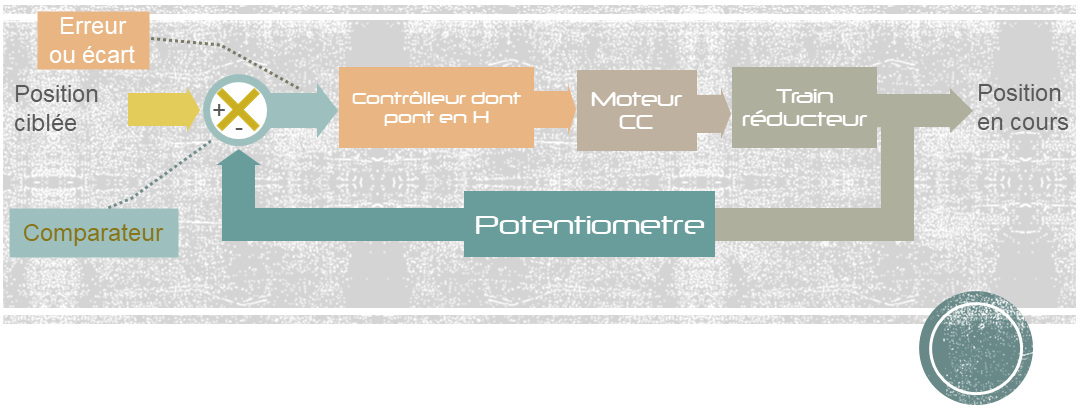
Reprenons le schéma ci-dessus et adaptons le à nos servomoteurs de modélisme (ou de loisirs, ceux qui ont généralement un potentiomètre et pas un capteur de position).
Les servomoteurs de modélisme sont des actionneurs de petites tailles utilisés pour contrôler les voitures jouets RC, les bateaux, les avions, etc. Ils sont également utilisés par les étudiants en ingénierie ou technologie (vous qui lisez par exemple !) pour le prototypage "rapid" en robotique etc..
Comment ça fonctionne ?
Petit récapitulatif,à l'intérieur d'un servo de modélisme, il y a quatre composants principaux:
- un moteur à courant continu
- un réducteur à train d'engrenages.
- un potentiomètre.
- un circuit de commande.
Le moteur à courant continu est à haute vitesse et à faible couple, mais le réducteur réduit la vitesse à environ 60 tr/min et augmente en même temps le couple.
Le potentiomètre est fixé sur le dernier pignon ou l'arbre de sortie, de sorte que le moteur tourne et le potentiomètre tourne également, produisant ainsi une tension liée à l'angle absolu de l'arbre de sortie.
Dans le circuit de commande, cette tension potentiométrique est comparée à la tension provenant de la ligne de signal.
Si nécessaire, le contrôleur active un pont en H intégré qui permet au moteur de tourner dans les deux sens jusqu'à ce que les deux signaux atteignent une différence de zéro.
Quel type de signal pour commander un servo ?
La consigne envoyée au servomoteur est un signal électronique de type PWM enfin pas tout à fait...nous verrons plus loin pourquoi ?
Toutefois, deux caractéristiques de ce signal sont nécessaires pour que le servo puisse interpreter la commande à réaliser.
- Une fréquence fixe (en l'occurence 50Hz)
- Une durée de l'état haut limitée
La modulation par largeur d'impulsion (MLI) ou plus connue sous l’appellation PWM (Pulse Width Modulation)
La PWM ou MLI est un signal numérique, donc la tension peut prendre deux valeurs seulement.
Dans certains cas très spécifiques (onduleurs à MLI par exemple) on fabrique un troisième niveau en inversant la tension du niveau haut.
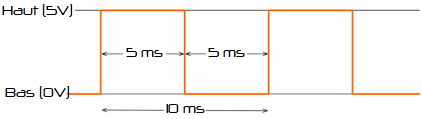
Le signal est carré et l'état bas correspond généralement à 0 V.
La période est notée T et enfin la durée de l’impulsion (pour laquelle la tension est celle de l’état haut) est appelée th.
Si la période change, le signal n’est plus vraiment périodique au sens strict.On appelle alors T la pseudo période.
Très bonne vidéo ci-contre de l'excellente châine Youtube U=R.I
Mais quel intérêt ?
Il y en à plusieurs mais deux nous intêressent particulièrement. On peut cependant citer les applications suivante :
- Variateurs de vitesse des moteurs
- Convertisseurs: AC/DC, DC/AC, DC/DC, AC/AC
- Générateur des signaux
- Modulateurs
- La conversion numérique-analogique
- Les amplificateurs de classe D
- Contrôle de puissance
Limiter la chauffe des composants
Par exemple : une lampe de 20 Watts allumée au maximum consomme 20 W. Si par une commande de gradation elle est allumée au quart de sa puissance, elle consomme 5 W.Le composant analogique devrait alors dissiper 15 W, ce qui implique un énorme radiateur.
En PWM, la puissance fournie est soit maximale, soit nulle.
- Lorsqu'elle est maximale, pendant un quart du temps par exemple, il n'y a pas besoin de dissiper de puissance résiduelle.
- Lorsqu'elle est nulle, il n'y a pas besoin de dissiper non plus de puissance, car elle n'est pas fournie du tout.
Faire varier la vitesse d'un moteur à courant continu
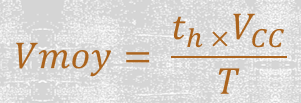
Et enfin l'intêret d'un signal PWM pour les servomoteurs est que la tension appliquée au moteur pendant th est Vcc.
Dans le cas d'un moteur à courant continu c'est suffisant pour vaincre les frottements et le faire fonctionner. La tension moyenne appliquée au moteur est proportionnelle au rapport cyclique, ce qui permet d’avoir des consignes de vitesse faibles :
Il y a une subtilité à saisir, ce dont a besoin servomoteur est une durée d'impulsion maintenue à l'état haut !
Du coup est-ce vraiment un signal de type PWM ?
Pas tout à fait ! (plus haut nous avons parlé d'une durée à l'état haut limitée) on appelle cela un signal modulé en code d'impulsions ou une modulation de position d'impulsion.
- Le signal PPM (Pulse-Position Modulation) ou MPI en français (Modulation en Position d'Impulsions) est un signal analogique qui est moins précis mais suffisant, c'est celui qui est utilisé pour notre servo et pour cause, il sagit d'une série de signaux PWM les uns après les autres avec une modulation particulière.
- Le signal PCM (Pulse Code Modulation) MIC en français(Modulation par Impulsion Codée) est un signal numérique plus précis et moins sensible aux perturbations mais plus couteux dont l'utilité est relativement faible pour la majorité des applications DIY, modélisme, robotique amateur etc...
La vidéo ci-dessus expose parfaitement cette subitilité entre signal PWM et PCM (Pulse Code Modulation) ou MIC en français.
Il est assez complexe de développer PCM et PPM dans cet article et ce n'est pas son but cependant de nos jours, la majorité des servos sont tous "PPM". Les technologies qui régissent ces deux formes de signal sont aujourd'hui très proches, ils ont pour origine la commande radio-fréquence des servomoteurs.
En définition, c'est une forme de signal, dont la période T doit être inférieure à 20 ms et les impulsions (5V d'amplitude) ont une largeur L qui varie de 1 à 2 ms, en théorie.
(Avec un signal PWM , L varie de 0 ms à T. - 0 à 100 % de T )
Pour faire simple : Avec un signal de type PWM on peut varier de 0 à la durée de la période T
Sauf que nos servos ont des impulsions limitées de 1 à 2ms (en théorie) du coup il faut un type de signal un peu différent de notre PWM qui soit capable de moduler d'1ms à 2ms.
Appliquons le bon signal au servomoteur
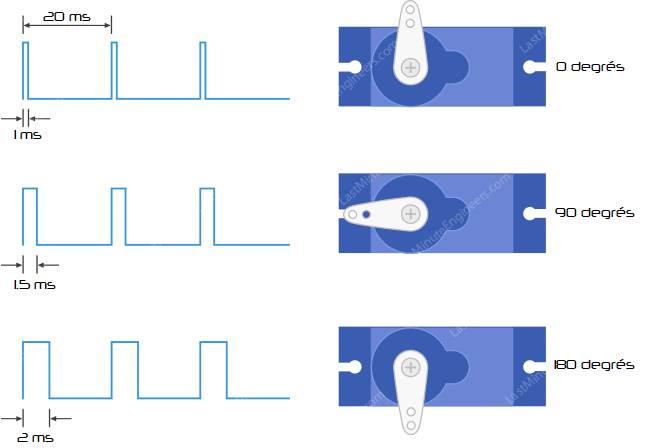
Il suffit donc d'envoyer une série d'impulsions à la ligne de signal. Un servomoteur analogique conventionnel s'attend à recevoir une impulsion toutes les 20 millisecondes environ (d'où la fréquence de 50Hz).
Conclusion ! La longueur de l'impulsion détermine la position du servomoteur.
- Si l'impulsion est élevée pendant 1 ms, l'angle d'asservissement sera nul.
- Si l'impulsion est élevée pendant 1,5 ms, le servo sera à sa position centrale.
- Si l'impulsion est élevée pendant 2 ms, le servo sera à 180 degrés.
- Des impulsions comprises entre 1 ms et 2 ms déplaceront l'arbre servo sur les 180 degrés de sa course.
La durée des impulsions peut parfois varier selon les marques et peut être de 0,5 ms pour 0 degré et 2,5 ms pour 180 degrés.
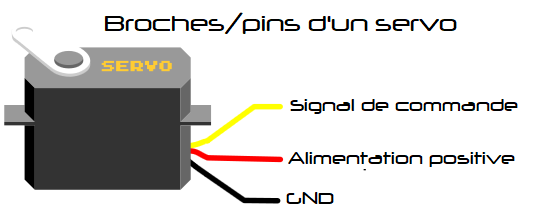
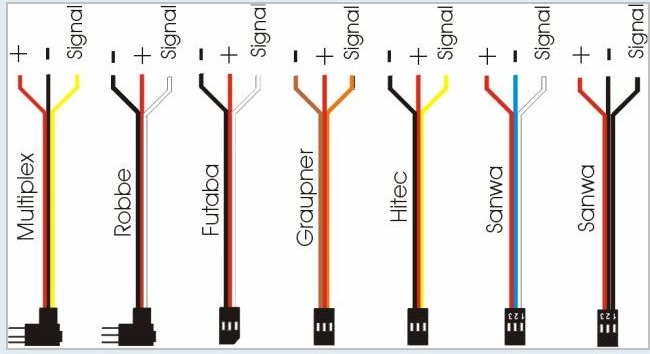
Comment connecter un servomoteur de modélisme ?
Les servomoteurs ont généralement trois connexions (broches/pins) qui peuvent changer selon les fabricants et sont les suivants :
Et la suite ?
Pour le prochain article, il faudra reprendre les connaissances et explications de celui-ci, l'objectif sera de commander un servomoteur avec une carte Arduino et de différentes façons.
Matlab Simulink, Flowode (chart/algorigramme), Arduino IDE (en c++) ou encore en block (visual coding) avec Tinkercad.
Merci pour votre temps, à bientôt.